|
對于電液伺服試驗系統中的多變量試驗控制對象,采用小波變換[1,2]和文獻[3]所提出的解耦控制結合“參征器”的復合控制策略,可有效地解除耦合影響和控制啟動、干擾和控制對象、方式改變對控制產生的影響,提高控制質量。為此我們研制了多變量控制系統試驗裝置。 1電液伺服多變量控制試驗裝置簡介 1·1控制對象 試驗裝置的控制對象是9個作動器,這是一個9*3的多變量系統。對應每個作動器中,均有位移、力和應變三個被控變量。這9個作動器中間存在著耦合關系,各個參量之間相互影響。例如一個作動器力、位移的增加和應變的變化,總是影響著另一個作動器力、位移的減少和應變的變化。該系統中,雖然變量相互關聯,但每個輸出變量總是有一個基本通道,即某一輸入變量必定通過某一基本通道影響某一輸出變量,即輸入與輸出變量配對。 1·2測量采樣環節 應變、力傳感器為應變電阻,位移為采用變壓器原理的傳感器,它們經A/D模塊,轉換成數字量。 1·3執行器 伺服作動器的執行器伺服閥均為電動調節閥,都為數字調節器輸出的數字量經D/A模塊,轉換成模擬量(0~10V)來控制的。 1·4微機電液伺服控制器(數字調節器) 數字調節器包括子控制器、主控制器和“參征”補償控制器,其不同控制規律,均由數字控制器編制的程序來實現。學生通過計算機進行“組態”和“參數設置”,即通過自由編程來完成電液伺服多變量系統試驗過程控制。 2電液伺服多變量控制試驗裝置的設計與實現 2·1設計原理 電液伺服系統是典型的機-電-液耦合系統,具有復雜非線性和不確定性特性。在多變量電液伺服控制系統中,某一個通道的控制調節器輸出的控制量將成為其它通道的調節器的干擾,所以,根據錯開控制原理,采用小波變換和文獻[3]所述方法,提出一種“主控制器”結合“參征器”的復合控制策略,來實現電液伺服試驗系統的多變量控制。小波變換的作用主要是實現信噪分離,及獲取PID神經元網絡和辨識網絡的輸入特征量:輸出反饋信號的模值和尺度的模局部極值矢量。錯開控制原理,即將整個控制系統分為多個獨立的控制閉環來考慮,采取分目標調節期望值的策略,只要它們各自的調節機構單獨工作時可使系統穩定,整個系統也總是保持在穩定域內。 “主控制器”結合“參征器”的控制系統結構如圖1所示。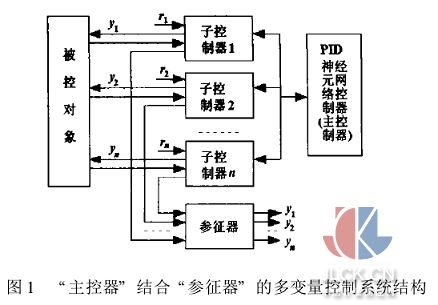 圖1中,子控制器的輸入有輸入給定r,被控對象反饋信號及pid神經元網絡輸出控制量。子控制器的輸出有內部辨識網絡的輸出,對n個被控對象控制輸入,以及為pid神經元網絡提供的輸入特征量:輸入給定,反饋信號小波變換模值,尺度3~尺度6上的小波變換模局部極值矢量。 主控器由多個并列子網絡組成,如果檢測系統有n個被控變量,子網絡就有n個。每個子網絡由一個三層PID神經元網絡構成,其各層神經元個數、連接方式、連接權初值以及控制參數的調整是基于被控過程的反饋信號小波變換結果,根據所提取的網絡輸入特征量信息,結合PID控制規律的基本原則和已有經驗確定的。子網絡的輸入層至隱層是相互獨立的。隱含層有3個神經元,其中包括1個比例元、1個積分元和1個微分元,它們的狀態函數分別為上、下限幅的比例、積分和微分函數。隱含層至輸出層是相互交叉連接的,使整個PID神經元網絡結合為一體;網絡的n個輸出值為通過對應子控制器對n個變量的控制輸入。子控制器主要為主控器提供輸入特征量,對被控對象的輸出反饋信號進行小波變換及特征提取、網絡辨識等數據處理;參征器的作用是根據子控制器內部辨識網絡的控制輸出命令,對對應被控對象進行補償控制。 2·2控制原則 當偏差較小,或被調節量離給定值較近且正在快速接近給定值時,則由主控制器施加較小的控制量(某范圍內控制量可為零),保證系統具有足夠高的控制精度和穩定性能;當偏差較大或被調量快速遠離給定值時,則在主控制器加大輸出控制的同時,根據偏差和偏差變化,由參征器中施加適當的控制量以控制被調節量返回給定值,保證系統響應的快速性,抑制干擾和其它情況的影響;對于某一控制瞬間受多閉環之間互擾影響的其它非控變量,則根據其對應反饋信號小波變換模值大小和尺度3-尺度6上模局部極值極性、幅度,下一次調節時取模值變化最大,模局部極值矢量表現特征最明顯者優先調節,并根據其模值、尺度上模局部極值極性、幅度大小,確定給定控制量的大小或方向。 2·3輸入輸出函數及算法設計 根據文獻[3],隱層各神經元的輸入函數為: 式中:i=1,2,…,6,ωsij、xsi、s、i、j、k的含義與文獻[3](1)式同;根據文獻[3],式(2)、(3)、(4)及式(5)可分別獲得比例元、積分元、微分元的狀態及隱含層各神經元的輸出。 對應子網絡神經元的傳遞函數采用S形函數;每個子網絡輸出層節點數目為1個。因為采用S形函數,理想輸出值設置為0·1。 本文包含PID神經元網絡和多變量對象在內的主控制器,采用誤差后向傳播的學習算法。學習的目標是使: 為最小。式中rp為系統給定值, yp為系統輸出值;m為每批采樣點數, n為被控變量個數。 按梯度法調節主控制器PID神經元網絡權值[5]。 學習步長的選取,采用Lyapunov穩定性原理確保系統收斂的學習步長范圍。 當PID神經元網絡的學習步長η滿足: 
權值調整算法: 保證控制系統在學習過程中收斂。其中W表示PID神經元網絡的連接權值ωsij和ω′sij,J由式(2)確定。
2·4仿真實例 如前所述,所研制的實驗裝置控制的作動器實際為9個,為便于描述,及簡化控制系統結構,以3個作動器的仿真來表征這一多變量系統的控制過程。控制對象為一電液伺服結構加載試驗系統。使用3個作動器分別從正面,背面和側面對一鋼筋混凝土構件進行靜力加載試驗。這一強耦合的非線性對象可由以下方程描述: 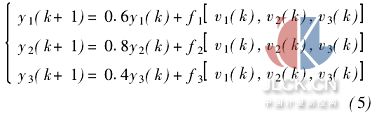
其中,非線性函數為: 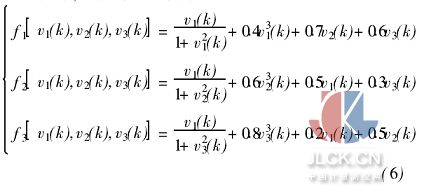
其中,v1(k),v2(k),v3(k)分別為三輸出反饋信號的傳遞函數,k為采樣時刻。 給定輸入激勵為: 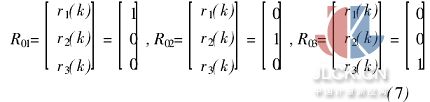
這時選取輸入給定分別為20kN、25kN、30kN的加載靜力。采用三輸出的主控制器結合“參征器”對其進行控制。每個子控制器計算步長為600μs內等間隔采樣完3個通道,每通道連續采樣8點數據。學習步長η=0·1,每批采樣點數m=768。 為了實現對3個作動器的聯合控制,每一變量作動器的反饋信號通過一個子控制器進行前述數據預處理后,與輸入給定一起送入主控制器內的對應子網絡輸入層節點。子控制器內CPU采用DSP芯片TMS320F206, A/D、D/A采用16位的ADS7805和AD669高速芯片。 本系統的最高控制調節頻率為600μs,即600μs內每個子控制器向主控制器對應子網絡提供一次輸入特征數據,主控制器根據輸入特征數據和網絡訓練的結果通過子控制器對該控制系統中的其中一個作動器進行一次控制調節。子控制器通過辨識網絡對小波變換的結果分析檢測到被控對象處于控制啟動、受到干擾或控制對象發生改變時,則在主控制器對該被控變量實施控制的同時,啟動參征器輸出頻率10kHz,幅度足夠的參征信號,對該被控變量實施補償控制。由于加入的參征信號,實現了類似積分的作用,從而達到抑制平衡點鄰域小范圍內振蕩的目的,消除可能引起的系統不穩定。由于本系統的最高動態響應頻率為200Hz (5ms),即系統的給定控制信號頻率在0~200Hz,因此, 600μs的調節(控制)頻率可以滿足系統動態響應的要求。這樣,經過幾個采樣周期以后,即可達到對系統實施穩定控制的目的。 用給定輸入激勵分別訓練網絡96次以后,系統對輸入給定為25kN的輸出響應如圖2 (a)所示;網絡訓練成功后,輸出載荷分別為20kN、25kN、30kN時的靜力加載控制曲線如圖2 (b)所示;學習的前25步中的系統誤差平方均值衰減曲線如圖2 (c)所示;控制對象由剛性負載變為柔性負載時,輸出載荷為30kN時的靜力加載控制曲線如圖2 (d)所示。 圖2 (a)、(b)分別從動態和靜態說明當某一個加載靜力的給定值從0變到目標值20kN,或25kN,或30kN作階躍擾動時,其余2個的耦合影響較小,而且三者都很快達到穩定狀態;圖2 (c)、(d)說明在控制初期、干擾影響、控制對象或方式改變時,由于加入參征信號對該被控變量實施補償控制,實現了類似積分的作用,從而達到抑制平衡點鄰域小范圍內振蕩的目的,消除可能引起的系統不穩定,使得網絡學習過程中的誤差單調遞減,未陷入局部極小點,能明顯降低切換點的擾動,使系統運轉更加平滑。從而說明該文所述方法能夠實現電液伺服多變量系統的聯合協調控制。 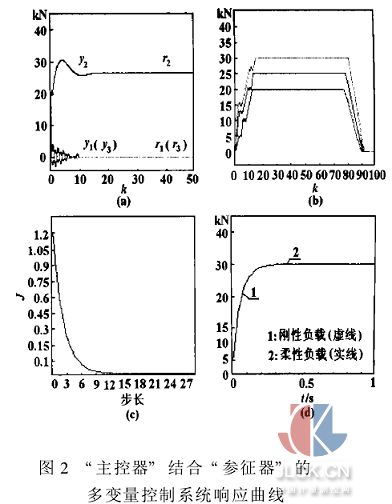
摘自:中國計量測控網
|






